1.该GPS网总基线数、必要基线数、独立基线数、多余基线数分别计算如下:
(1)总基线数:J总=C×N×(N-1)/2=3×3×2/2=9;
(2)必要基线数:J必=n-1=4-1=3;
(3)独立基线数:J独=C×(N-1)=3×(3-1)=6;
(4)多余基线数:J多=C×(N-1)-(n-1)=3。
2.(1)计算基线长度。

(2)计算同步边差值。
Δd=|d2-d1|=4632.8614-4632.8534=0.0080(m)=8(mm)
(3)计算测边中误差。
①基线平均边长:
d=(d1+d2)/2=(4632.8534+4632.8614)/2=4632.8574(m)
②计算测边中误差:

③判定是否合格,计算限差:

因为Δd<Δdmax所以重复边D016~D003是合格的。
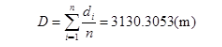
3.(1)同步环坐标分量的闭合差和环闭合差,即
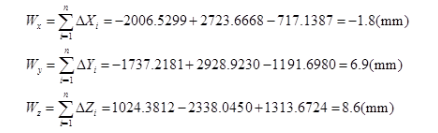
式中:Wx、Wy、Wz为第i条基线向量的坐标差分量。
(2)计算测边中误差:
①计算基线边长。

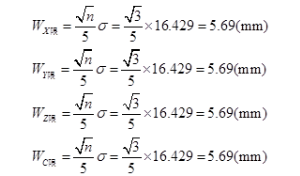
②计算闭合环平均边长。
③计算侧边中误差。

④计算闭合差限差。
⑤判定是否合格:WX≤WX限,WY≤WY限,WZ≤WZ限,Wc≤Wc限,但实际上,WX<WX限,WY>WY限,WZ>WZ限,WC>Wc限,所以该同步环不合格。
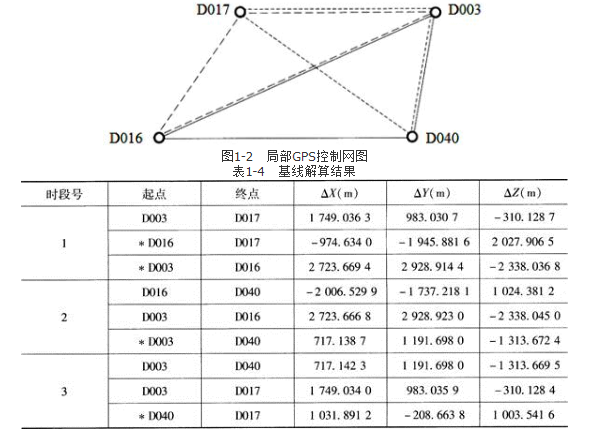
4.同步环是指在用GPS进行测量过程中,由3台或3台以上接收机,同时对同一组卫星进行观测(同步观测)所获得的基线向量所构成的闭合多边形。异步环是在用全球定位系统(GPS)进行测量中,由数条GPS独立边构成的闭合多边形。在GPS网中,必须保证有足够数量的异步环,才能确保观测成果的可靠性。表中以“*”表示的四条边组成的闭合环是异步环。